| 概要 |
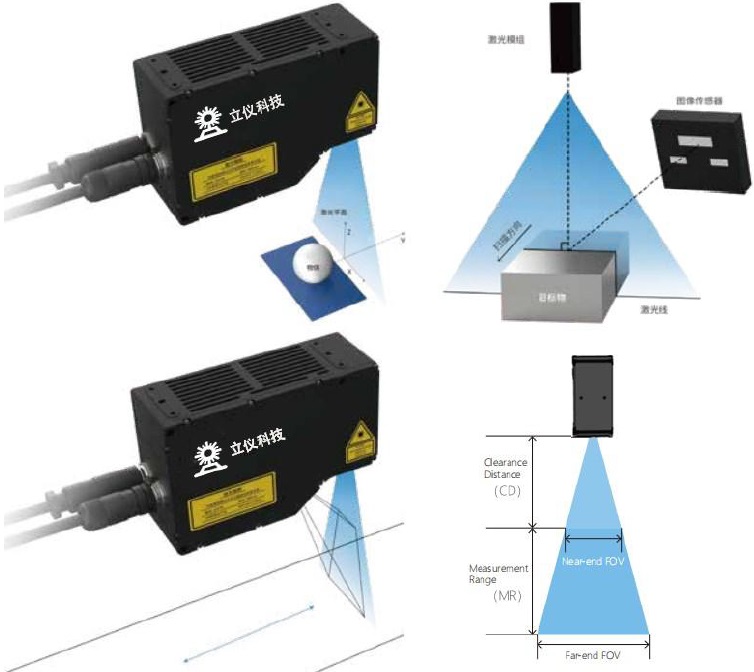
测量原理:激光器产生线激光投射于物体表面,经物体漫反射,被图像传感器采集成像。图像处理器内部解算物体在激光投射处的空间位置,得到激光轮廓X方向的宽度信息和Z方向的深度信息。通过被测物体和传感器的相对运动,获取一系列的轮廓信息进行融合,就可以得到物体完整的三维形貌。
|
*特别适用于Z轴高度信息的检测和测量应用,如产品的高低段差、平面度、位置度、轮廓度、体积等的测量。
*受环境光影响小,广泛应用智能制造的工业检测领域。 |
 |
| 特征 |
系列化高速、高精度4K线激光相机
·主要针对高精密的检测要求,如Pin针、元器件管脚、锂电池电芯焊接等超高精度高速产线需求;
·1200Hz全画幅采集速率,物理轮廓点数4096点,深度图均匀间距采样最高8000点;
·最大视野55.8mm;
·最大测量范围至18.4mm。 |
| 技术概述 |
| 产品型号 |
单位 |
LS-2710 |
LS2730 |
| 激光波长 |
Nm |
405 |
405 |
| 安装净距离CD |
mm |
31 |
51.2 |
| 近端FOV |
mm |
21.2 |
45.6 |
| 远端FOV |
mm |
24 |
55.8 |
| 景深MR |
mm |
5.8 |
18.4 |
| 物理轮廓点数 |
- |
4096 |
4096 |
| X方向分辨率 |
μm |
5.1-5.9 |
11.1-13.6 |
| Z方向重复精度 |
μm |
0.1 |
0.3 |
| Z方向线性度MR |
% |
0.02 |
0.02 |
| 扫描速度(点云轮廓) |
s |
1200-16000 |
| 电源DC |
V |
24V±10%(24W) |
| 激光类别 |
- |
2M(输出可调,可选3R) |
| 工作温度 |
℃ |
0-50℃ |
| 防毒等级 |
- |
铝合金全封闭设计,IP67 |
| 通信接口 |
- |
千兆网络接口,24VTTL输入1个,输出1个,RS485双向IO 2个 |
| 振动试验 |
- |
10至55Hz,双振幅1.5mm,X,Y,Z方向各2个小时 |
| 冲击试验 |
- |
峰值加速度为15g,持续时间为11ms的半正弦波冲击 |
|
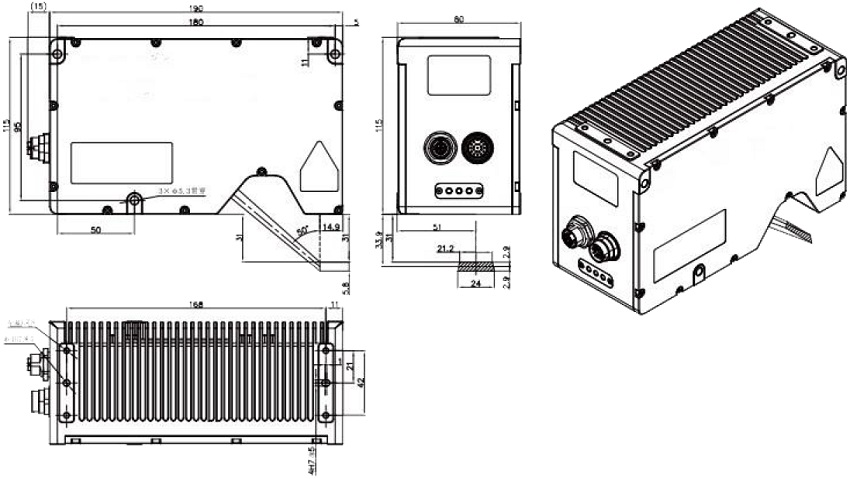
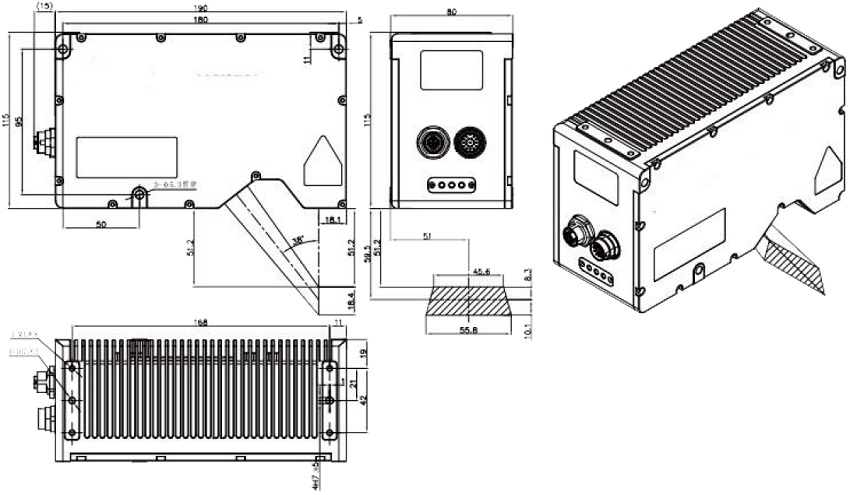
| 外形尺寸 |
| LS2710 |
 |
| LS2730 |
 |
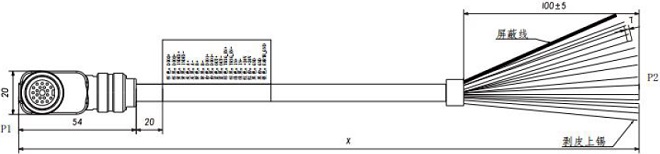
| 电源和通讯线缆/直头 |
 |
| 电源和通讯线缆/弯头 |
 |
| 网络线缆/直头 |
 |
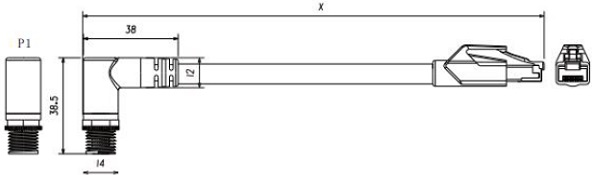
| 网络线缆/弯头 |
 |
| |
| |